输入参数:
法面模数Mn=0.15
端面模数Mt=0.152314
太阳轮齿数z1=13
行星轮齿数z2=16
内圈(大)齿数z3=45
法面分度圆压力角αn=20.0°
端面分度圆压力角αt=20.2836°
齿顶高系数han=1.0
顶隙系数cn=0.25
螺旋角β=10.0°
外齿轮齿根曲线圆角系数ρc=0.38
内齿轮齿根圆角系数ρr=0.1
齿轮z1齿宽B1=8.3
齿轮z2齿宽B2=3.3
行星轮个数cs=3
齿轮第二公差组精度等级IT=7
计算结果:
实际中心距a'=2.3
最小侧隙Jnmin= 120 μm(参考值)
(按GB10095-88参考值)
外啮合齿轮副z1,z2标准中心距a=2.20855
外啮合齿轮副z1,z2中心距变动因素У=0.600386
外啮合齿轮副z1,z2啮合角α'=25.7505°
外啮合齿轮副z1,z2齿高变位因数ΔУ=0.0804027
外啮合齿轮副z1,z2法面总变位因素Σχn12=0.691291
外啮合齿轮副z1,z2 齿数比u12=1.23077
外啮合齿轮副z1,z2端面总变位因数Σχt12=0.680788
内啮合齿轮副z2,z3标准中心距a=2.20855
内啮合齿轮副z2,z3中心距变动因素У=0.600386
内啮合齿轮副z2,z3啮合角α'=25.7505°
内啮合齿轮副z2,z3齿高变位因数ΔУ=0.0804027
内啮合齿轮副z2,z3法面总变位因素Σχn23=0.691291
内啮合齿轮副z2,z3齿数比u23=2.8125
内啮合齿轮副z2,z3端面总变位因数Σχt23=0.680788
齿轮z1的法面变位因数χn1=0.392
齿轮z2的法面变位因数χn2=0.299291
齿轮z3的法面变位因数χn3=0.990581
齿轮z1的端面变位因数χt1=0.386045
齿轮z2的端面变位因数χt2=0.294744
齿轮z3的端面变位因数χt3=0.975532
齿轮z1齿顶圆直径da=2.37319 齿轮z1齿根圆直径df=1.72268
齿轮z1的固定弦齿厚sf1=0.245853
齿轮z1的固定弦齿高hf1=0.151812
齿轮z1的当量分度圆弦齿厚sv1=0.27756
齿轮z1的当量齿分度圆弦齿高hv1=0.206031
齿轮z1的公法线跨测齿数k1=2
齿轮z1的公法线长度w1=0.732982
齿轮z1的法面齿顶厚sa1=0.080974
对于硬齿面,必须sa1>0.25*mn=0.0375
对于软齿面,必须sa1>0.40*mn=0.06
当按z1与z2啮合计算时,齿轮z2齿顶圆直径da=2.80232 齿轮z2齿根圆直径df=2.15181
齿轮z2的固定弦齿厚sf2=0.236914
齿轮z2的固定弦齿高hf2=0.139532
齿轮z2的当量分度圆弦齿厚sv2=0.26779
齿轮z2的当量齿分度圆弦齿高hv2=0.189802
齿轮z2的公法线跨测齿数k2=2
齿轮z2的公法线长度w2=0.730053
齿轮z2的法面齿顶厚sa2=0.096286
对于硬齿面,必须sa2>0.25*mn=0.0375
对于软齿面,必须sa2>0.40*mn=0.06
z1,z2端面重合度εα=1.22522 (应大于或等于1.0,一般≥1.2)
z1的滑动率η12_1=2.48907
z2的滑动率η12_2=2.48883
当按z2与z3啮合计算时,齿轮z2齿顶圆直径da=2.80232 齿轮z2齿根圆直径df=2.15181
内圈(大)齿轮z3齿顶圆直径da=6.86466 齿轮z3齿根圆直径df=7.5263
内齿轮z3的固定弦齿厚sf3=0.112547
内齿轮z3的固定弦齿高hf3=-0.0251162
内齿轮z3的当量齿分度圆弦齿厚sv3=0.12745
内齿轮z3的当量齿分度圆弦齿高hv3=-0.0052089
内齿轮z3的公法线跨测齿数k3=7
内齿轮z3的公法线长度w3=3.07873
内齿轮z3的法面齿顶厚sa3=0.131508
z2,z3端面重合度εα=1.35146 (应大于或等于1.0,一般≥1.2)
z2的滑动率η23_2=1.09787
z3的滑动率η23_3=0.25959
当齿轮z2齿顶圆按z1与z2啮合计算值,da=2.80232时,
z2,z3端面重合度εα=1.35146 (应大于或等于1.0,一般≥1.2)
z2的滑动率η23_2=1.09787
z3的滑动率η23_3=0.25959
轴向重合度εβ=1.21603 (应大于或等于1.0,一般≥1.2)
行星轮的分度角K1=117.931°
行星轮的自转角S1=95.819°
行星轮的分度角K2=242.069°
行星轮的自转角S2=196.681°
齿轮z1的法面变位因数χn1=0.392
齿轮z2的法面变位因数χn2=0.299291
齿轮z3的法面变位因数χn3=0.990581
齿轮z1的端面变位因数χt1=0.386045
齿轮z2的端面变位因数χt2=0.294744
齿轮z3的端面变位因数χt3=0.975532
太阳轮z1与行星轮z2的啮合滑动率η12_1=2.48907
行星轮z2与太阳轮z1的啮合滑动率η12_2=2.48883
行星轮z2与内齿轮z3的啮合滑动率η23_2=1.09787
内齿轮z3与行星轮z2的啮合滑动率η23_3=0.25959
已知中心距a'=2.30000000,按齿轮z1,z2滑动率(齿廓磨损率)相等η12_1=η12_2计算变位系数:
按齿轮z1,z2的啮合滑动率相等η12_1=η12_2:(太阳轮z1与行星轮z2的滑动率=行星轮z2与太阳轮z1的滑动率)
齿轮z1的法面变位系数χn1=0.392023
齿轮z2的法面变位系数χn2=0.299268
齿轮z3的法面变位系数χn3=0.982581
太阳轮z1与行星轮z2的啮合滑动率η12_1=2.48893
行星轮z2与太阳轮z1的啮合滑动率η12_2=2.48893
行星轮z2与内齿轮z3的啮合滑动率η23_2=1.09795
内齿轮z3与行星轮z2的啮合滑动率η23_3=0.259584
已知中心距a'=2.30000000,按齿轮z1,z2滑动率(齿廓磨损率)相等η12_1*cs=η12_2计算变位系数:
按齿轮z1,z2的啮合滑动率η12_1*cs=η12_2:(太阳轮z1的滑动率*行星轮z2的个数=行星轮z2与太阳轮z1的滑动率)
齿轮z1的法面变位系数 χn1=0.655478
齿轮z2的法面变位系数 χn2=0.0358123
齿轮z3的法面变位系数 χn3=0.727103
太阳轮z1与一个行星轮z2的啮合滑动率η12_1=1.32025
一个行星轮z2与太阳轮z1的啮合滑动率η12_2=3.96074
一个行星轮z2与内齿轮z3的啮合滑动率η23_2=2.85965
内齿轮z3与一个行星轮z2的啮合滑动率η23_3=0.196718
已知中心距a'=2.30000000,按齿轮z2,z3滑动率(齿廓磨损率)相等计算变位系数无解
已知中心距a'=2.30000000,按齿轮z2,z3滑动率(齿廓磨损率)相等计算变位系数:
按齿轮z2,z3的啮合滑动率η23_2=η23_3*cs:(行星轮z2与内齿圈z3的滑动率=内齿圈z3与行星轮z2的滑动率*行星轮z2的个数cs)
齿轮z1的法面变位系数 χn1=0.296606
齿轮z2的法面变位系数 χn2=0.394684
齿轮z3的法面变位系数 χn3=1.08597
太阳轮z1与行星轮z2的啮合滑动率η12_1=3.13053
行星轮z2与太阳轮z1的啮合滑动率η12_2=2.1028
行星轮z2与内齿轮z3的啮合滑动率η23_2=0.840977
内齿轮z3与行星轮z2的啮合滑动率η23_3=0.280326
齿轮z1法向齿顶厚为0.25*mn时的变位系数 χn1_mn25 =0.795022
(对于硬齿面,必须小于此变位系数.)
此时齿轮z2的变位系数为: -0.103732
齿轮z1法向齿顶厚为0.4*mn时的变位系数 χn1_mn40 =0.599585
(对于软齿面,必须小于此变位系数.)
此时齿轮z2的变位系数为: 0.0917059
太阳轮z1不根切的最小变位系数为: 0.20391
行星轮z2不根切的最小变位系数为: 0.0201965 (所选变位系数必须大于此根切的变位系数.)
如果按等滑动率计算变位系数,应该使:
太阳轮z1与一个行星轮z2的滑动率*行星轮的个数=一个行星轮z2与太阳轮z1的滑动率
这样才能使行星轮的磨损率与太阳轮的磨损率大致相等,寿命大致相等.
滑动率=齿廓磨损率,齿廓磨损率越大,噪音越大,寿命越短
太阳轮同时和几个行星轮啮合,磨损率最大,要设法降低太阳轮的滑动率,延长太阳轮的寿命.按齿轮z1,z2的啮合滑动率η12_1*cs=η12_2 是个好办法.
以上齿轮参数存于solar.txt之中。
中国国家标准规定,分度圆压力角为20°
长齿ha*=1时,c*=0.25
短齿ha*=0.8时,c*=0.3
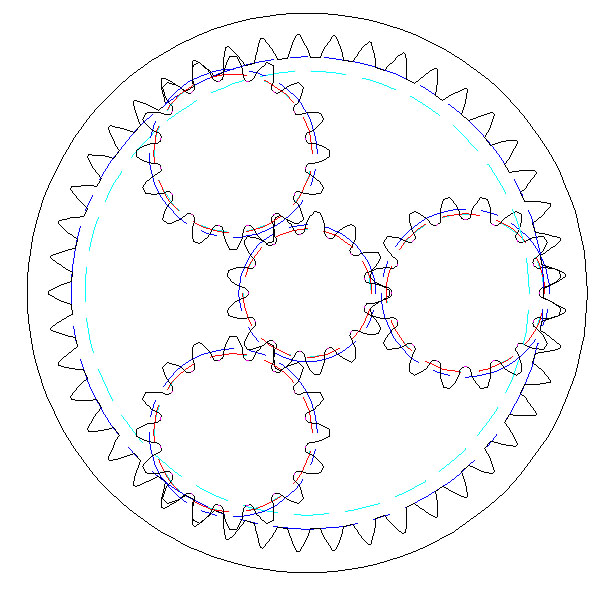
蓝色的圆为分度圆,湖蓝色的圆为基圆。
红色的圆为渐开线起始圆。如果发生根切,渐开线起始点则为过渡曲线与渐开线的交点。
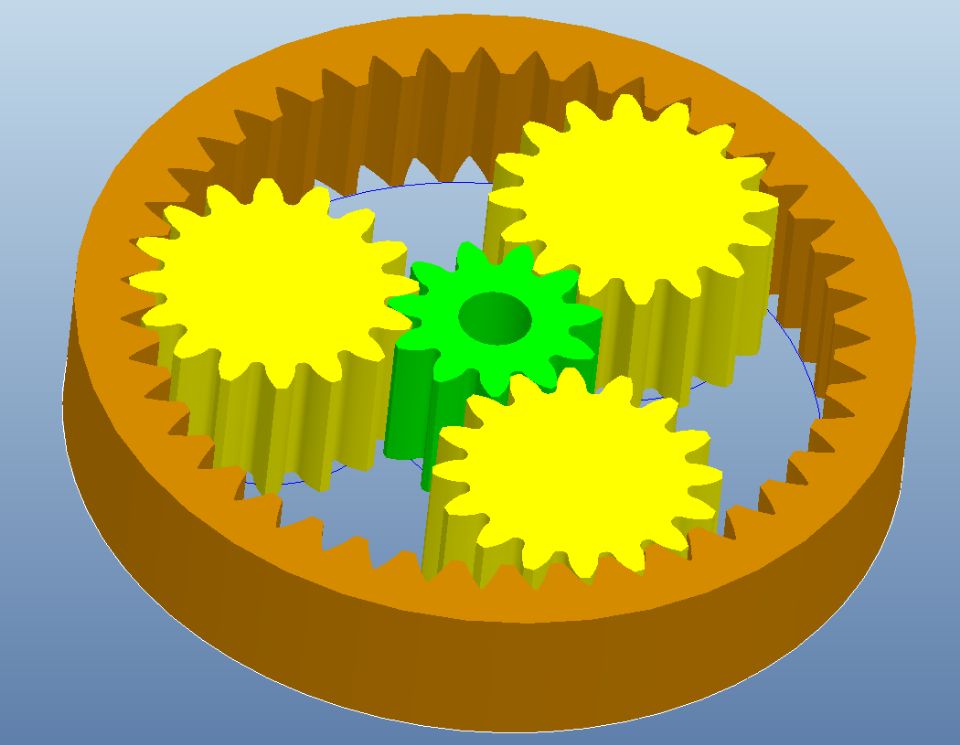
此为变位行星轮系,可全自动的设计变位行星轮系,校验内啮合齿轮副的干涉。
太阳轮z1自动画在Za层上,行星轮z2自动画在Zc层上,内齿圈z3自动画在Zb层上。







 关闭
关闭